segunda-feira, 27 de outubro de 2014
segunda-feira, 29 de setembro de 2014






terça-feira, 23 de setembro de 2014
Robô sobre pernas mais rápido do mundo
Uma empresa americana chamada Robotics Unlimited conseguiu criar o robô mais rápido do mundo sobre pernas. Chamado OutRunner, a peça é capaz de atingir 72 km/h em uma esteira e 40 km/h correndo em terreno comum e externo.
O recorde anterior, superado com folga, era pertencente à Boston Dynamics, empresa comprada recentemente pelo Google. A empresa havia atingido 26 km/h em terreno externo e 45,5 km/h em esteira.
http://olhardigital.uol.com.br/noticia/42161/42161
Conhecendo mais sobre Robôs
Um robô é uma máquina que faz tarefas sem a ajuda de seres humanos. Embora muitas pessoas achem que os robôs parecem humanos e agem como pessoas, a maioria deles tem aparência bem diversa e só executa funções previamente programadas.
Funcionamento dos robôs
A maioria dos robôs consiste em mecanismos compostos por várias partes e controlados por computador. Um robô industrial, por exemplo, é uma máquina semelhante a um braço com várias articulações. A parte semelhante à mão agarra e sustenta coisas. As diferentes partes de um robô são movimentadas por motores.
Alguns robôs podem ser “ensinados” a fazer determinado trabalho. Uma pessoa, por exemplo, pode dar comandos para que um robô industrial faça os movimentos necessários para executar alguma tarefa. Os sensores no robô enviam sinais sobre os movimentos para o computador, o qual armazena o padrão desses movimentos. Depois, o computador pode recuperar o padrão e orientar o robô sobre o que deve ser feito.
Robôs na ficção científica
Os robôs aparecem muito na ficção científica, histórias ambientadas no futuro ou em outro mundo. Em livros, programas de televisão, videogames e filmes de ficção científica, os robôs frequentemente pensam, ouvem, falam e andam facilmente sobre duas pernas. Os de aparência humana são conhecidos como androides. Embora estejam ficando mais complexos, os robôs reais ainda estão longe daqueles criados pela imaginação humana.
http://escola.britannica.com.br/article/482381/robo
http://escola.britannica.com.br/article/482381/robo
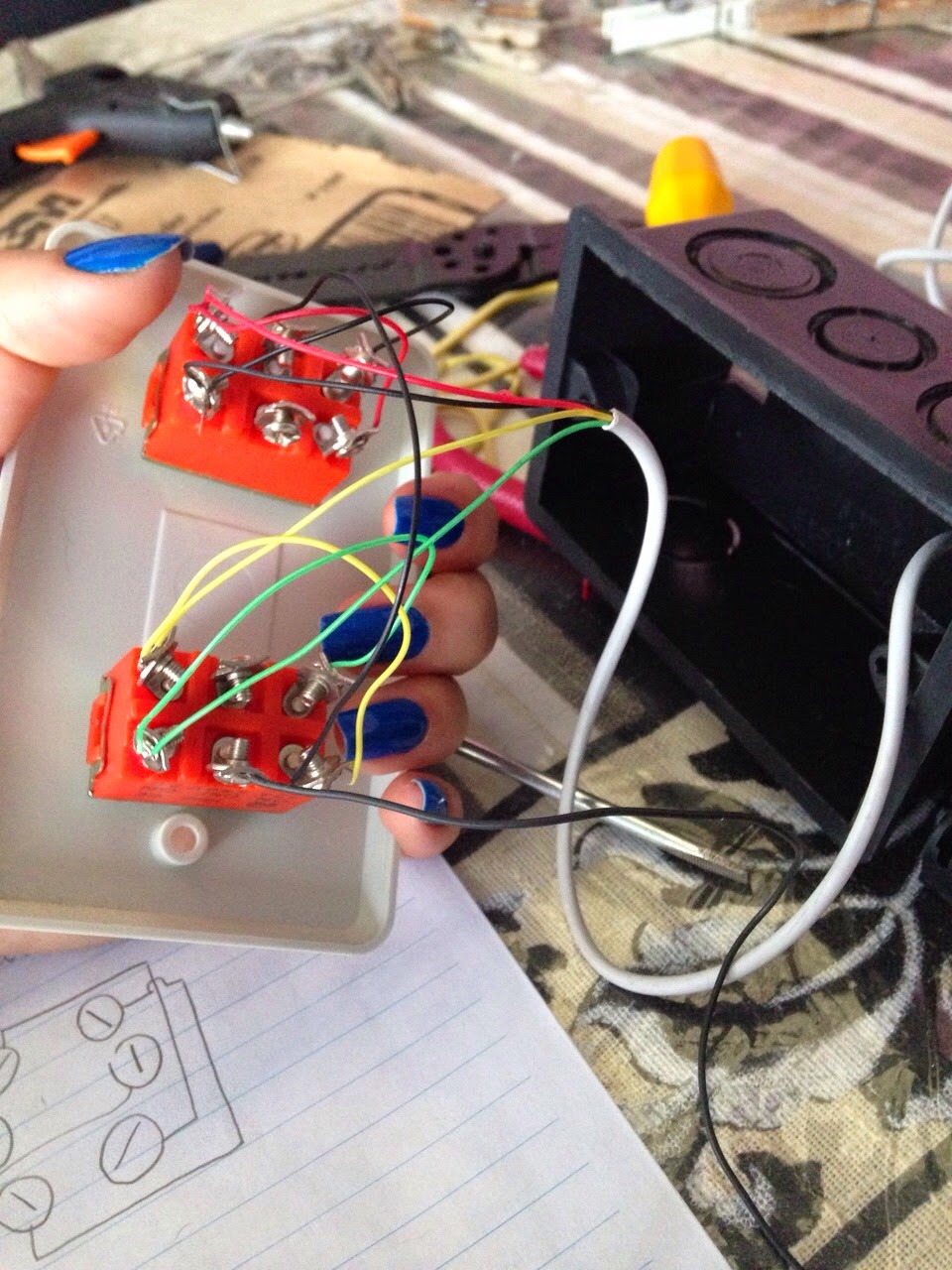
1º reunião com sucesso para montagem do Robô
Aqui estão algumas fotos dos materiais e dos passos que usamos para a construção do Robô Gladiador:










Está dando certo!!!!
quinta-feira, 4 de setembro de 2014
Primeiro Robô do mundo
O primeiro robô do mundo foi inventado em 1770
Clara Caldeira on 5 de maio de 2014 às 15:47
É difícil de acreditar, mas em 1770 o relojoeiro suíço Pierre Jaquet- Droz criou o que pode ser considerado o primeiro robô e portanto o primeiro computador da história da humanidade, o ‘The Writer’.
Tratava-se de um bonequinho descalço, mas luxuosamente vestido, escrevendo uma carta com uma pena na mão. Poderia ser facilmente confundido com um bibelô vintage.
Mas por dentro seus 6 mil componentes e uma máquina de escrever auto-suficiente e programável faziam a magia acontecer. Este documentário da BBC, “Mechanical Marvels: Clockword Dream” mostra como essa engenhoca de 240 anos de idade foi projeta e construída.
https://aoquadrado.catracalivre.com.br/2014/05/05/o-primeiro-robo-do-mundo-foi-inventado-em-1770/
Clara Caldeira on 5 de maio de 2014 às 15:47
É difícil de acreditar, mas em 1770 o relojoeiro suíço Pierre Jaquet- Droz criou o que pode ser considerado o primeiro robô e portanto o primeiro computador da história da humanidade, o ‘The Writer’.
Tratava-se de um bonequinho descalço, mas luxuosamente vestido, escrevendo uma carta com uma pena na mão. Poderia ser facilmente confundido com um bibelô vintage.
Mas por dentro seus 6 mil componentes e uma máquina de escrever auto-suficiente e programável faziam a magia acontecer. Este documentário da BBC, “Mechanical Marvels: Clockword Dream” mostra como essa engenhoca de 240 anos de idade foi projeta e construída.
https://aoquadrado.catracalivre.com.br/2014/05/05/o-primeiro-robo-do-mundo-foi-inventado-em-1770/
Sabendo mais sobre Robótica e suas aplicações Industriais
A seguir temos um artigo, publicado no site da Rede Globo, no dia 11/05/2013, e atualizado no dia 13/05/2013. Ele apresenta conceito de robótica, ciência encarregada em planejar e construir robôs em diferentes áreas, e suas aplicações na produção industrial, a qual a diferencia das máquinas automatizadas, onde os robôs podem exercer várias funções, segundo citações do Glauco Caurin, professor da Escola de Engenharia de São Carlos, pertencente à Universidade de São Paulo (EESC/USP).
"Robôs
Você sabe o que significa a expressão “robótica”? Pois bem, trata-se da ciência que está encarregada de planejar e construir robôs, englobando várias áreas, como as engenharias mecânica, elétrica e eletrônica, incluindo também diversos ramos da física e da computação.
Conforme explica Glauco Caurin, professor da Escola de Engenharia de São Carlos, pertencente à Universidade de São Paulo (EESC/USP), a robótica trabalha exclusivamente com a parte mecânica dos movimentos de um robô, ou seja, com os dispositivos que atuam no seu deslocamento, ou em alguma funcionalidade que o faça interagir com o meio ambiente, por exemplo. “Do ponto de vista da engenharia, a robótica é muito atraente, já que incorpora uma série de ciências básicas. Ela trabalha com movimentos, o que é de interesse da mecânica; com a eletrônica; e com a computação, que atua como o cérebro de todo esse sistema”, conta o docente.
Mas o que diferencia um robô de uma máquina automatizada, como as que são empregadas nas fábricas? Como destaca Glauco, ambos os equipamentos vão ter movimentos controlados. “A diferença, é que a máquina automatizada executa determinada tarefa de forma exclusiva, sendo muito eficiente e rápida neste sentido. Já um robô pode assumir várias funções em uma fábrica. Na linha de montagem, por exemplo, ele pode ser empregado em um processo de soldagem, ou, então, na parte de pintura. Ou seja, o robô pode ter várias tarefas, sendo programado para isso, enquanto que a máquina automatizada não, pois só executa um tipo de função”, ressalta o professor.
Na indústria automobilística, o uso de robôs e de máquinas automatizadas garante, segundo o especialista, uma padronização na execução de tarefas dentro de uma linha de montagem. Ele explica que a vantagem está em manter a mesma qualidade nas peças fabricadas. Segundo dados da Organização das Nações Unidas (ONU), são introduzidos por ano cerca de 80 mil robôs nas indústrias em todo o mundo. A entidade estima que existam mais de 800 mil desses equipamentos sendo empregados atualmente.
O motivo para esse processo de robotização, que se deu com maior força a partir do início na década de 70, está na maximização da produção, já que o emprego de robôs em uma linha de montagem pode multiplicar em até quatro vezes a produção. “No Brasil, o processo de automação se deu com muita força na indústria automobilística. Na década de 80, já tínhamos um movimento se consolidando nessa direção”, conta o docente.
“Há muitas pesquisas na área de robótica. Hoje em dia, fora do universo industrial, estão sendo desenvolvidos vários tipos de robôs, desde os humanoides aos que se assemelham aos animais, por exemplo. Existem também os robôs que em nada tem a ver com a figura humana, ou de animais, que são empregados para as mais diversas atividades, incluindo tarefas delicadas, como desativar bombas”, exemplifica.
O professor lembra também que há métodos para fazer com que um robô pareça inteligente, e isso se dá por meio de tentativas de recriar o sistema nervoso do ser humano: as chamadas Redes Neurais Artificiais. Compostas por técnicas computacionais que apresentam um modelo matemático inspirado na estrutura neural de organismos inteligentes, uma grande Rede Neural Artificial, por exemplo, pode ter centenas, ou até milhares, de unidades de processamento. “A partir daí, programam-se lógicas para que a máquina tome decisões baseadas nas informações que ela coleta do meio ambiente através dos seus sensores”, afirma Glauco."
Fonte: http://redeglobo.globo.com/globouniversidade/noticia/2013/05/saiba-o-que-estuda-robotica-e-suas-aplicacoes-na-producao-industrial.html

sexta-feira, 20 de junho de 2014
Invenção do telefone- primeira parte do relatório de latinha
Polemica:
Alexander Graham Bell nasceu na cidade escocesa de Edimburgo, dia 3 de março de 1847. Estudioso da ciência da acústica, conhecido aplamente como pai do telefone, há alguns indícios de que isso não seja uma verdade absoluta. À sombra da história está o italiano Antonio Meucci, inventor nascido na cidade de Florença e que muitos apontam como o verdadeiro criador do telefone.
Alexander Graham Bell nasceu na cidade escocesa de Edimburgo, dia 3 de março de 1847. Estudioso da ciência da acústica, conhecido aplamente como pai do telefone, há alguns indícios de que isso não seja uma verdade absoluta. À sombra da história está o italiano Antonio Meucci, inventor nascido na cidade de Florença e que muitos apontam como o verdadeiro criador do telefone.
O registro feito por Bell no escritorio de patentes dos estados unidos era a patente de um aparelho eletromagnético que permitia a comunicação simultânea entre dois pontos a uma longa distância entre si. Na mesma época, porém, surgiu a primeira briga judicial de Bell: Elisha Gray, engenheiro elétrico estadunidense, também reivindicava a invenção do telefone.
Porém após novas ideias, pensamentos de aprimorar o mesmo. Surgiu Antonio Santi Giuseppe Meucci, nascido em Florença, na Itália, em 13 de abril de 1808, foi estudante de engenharia química e industrial e teria inventado um protótipo do telefone bem antes do imbróglio entre Gray e Bell da metade da década de 1870.
Origem do Telefone de Latinha- Primeira parte do relatório
Origem:
Como uma brincadeira de criança Robert Hooke, cientista inglês, em 1667 demonstrou a transmissão do som, através de duas latinhas e um cordão esticado.
http://portalbraganca.com.br/braganca-paulista/museu-do-telefone.htm
Como uma brincadeira de criança Robert Hooke, cientista inglês, em 1667 demonstrou a transmissão do som, através de duas latinhas e um cordão esticado.
http://portalbraganca.com.br/braganca-paulista/museu-do-telefone.htm
Acústica de instrumento- Primeira parte do relatório
Acústica:
Os instrumentos musicais e nosso aparelho fonador são exemplos de fontes sonoras. Estas produzem vibrações que são transmitidas as moléculas do meio, resultando assim em uma onda de pressão que se propaga.
Quando essa onda atinge o ouvido, o tímpano vibra e envia impulsos ao cérebro, produzindo a sensação sonora.
Os instrumentos musicais e nosso aparelho fonador são exemplos de fontes sonoras. Estas produzem vibrações que são transmitidas as moléculas do meio, resultando assim em uma onda de pressão que se propaga.
Quando essa onda atinge o ouvido, o tímpano vibra e envia impulsos ao cérebro, produzindo a sensação sonora.
Primeira parte do relatório do telefone de latinha/ Testes
Tempo de 1 minuto para cada teste
Barbante fio encerado lã
Lata de nescau 13 palavras certas 15 palavras certas 10 palavras certas
Copo do mc donalds 300ml e 500ml 23 palavras certas 19 palavras certas 14 palavras certas
Copinho descartįvel 18 palavras certas 12 palavras certas 7 palavras certas
Construção. - Relatório telefone de latinha
A) Através de desenhos, fotos ou vídeos ensine como construir um telefone de latinha vitorioso
Separe dois copos de tamanhos diferentes no caso o escolhidos foram do mc donalds de 300ml e 500ml e 10,5 metros de barbante.
Separe dois copos de tamanhos diferentes no caso o escolhidos foram do mc donalds de 300ml e 500ml e 10,5 metros de barbante.
Fure os copos na parte de baixo exatamente no meio para que possa passar o barbante.
Nos furos passe o barbante do dois lados e de um nó nas extremidades para que fiquei preso nos coposEstique o fio e deixe bem tensionado, para utilizar o telefone escute pelo menor lado, deste modo você estará pronto para se comunicar.
.jpeg)





5 conceitos físicos. - Relatório telefone de latinha
B) Cite 5 conceitos físicos presentes no experimento e explique a relação dos conceitos dentro do experimento.
Comprimento do barbante:10 m - Freqüência do som emitido pelo aluno
Massa do barbante: 7 g - O peso que vai definir a quantidade que vibrará ao emitir som
Densidade linear: 0,7 g/m - Velocidade do som no barbante
Dimensão da latinha: 9,5 cm - Altura do som que irá escutar e emitir
Velocidade do som no barbante: 340 m/s - Comprimento de onda da voz do aluno escolhido
Função de cada elemento. - Relatório telefone de latinha
C) Indique a função de cada elemento do grupo no projeto do telefone de latinha.
Amanda: fornecedora dos materiais para a construção do telefone de latinha; construtora do telefone de latinha; responsável pela fala nos momentos de competição; responsável pelos testes.
Barbara: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Gabriela: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Luana: construtora do telefone de latinha; responsável pela escuta nos momentos de competição.
Rafaela: responsável por anotar, ao lado de quem escuta, as palavras ou frases durante a competição.
Thaiany: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Thalia: responsável por anotar, ao lado de quem fala, as palavras ou frases durante a competição; responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Barbara: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Gabriela: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Luana: construtora do telefone de latinha; responsável pela escuta nos momentos de competição.
Rafaela: responsável por anotar, ao lado de quem escuta, as palavras ou frases durante a competição.
Thaiany: responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Thalia: responsável por anotar, ao lado de quem fala, as palavras ou frases durante a competição; responsável pelas ideias de palavras, quando necessário, nos momentos de competição.
Características físicas do experimento. - Relatório telefone de latinha.
D) Responda características físicas do experimento:
D1) Qual a frequência da voz humana?
A mais baixa frequência que pode dar a audibilidade a um ser humano é mais ou menos a de 20 hertz (vibrações por segundo), enquanto a mais alta se encontra entre 10 000 e 20 000 hertz, o que depende da idade do ouvinte (quanto mais idoso menores as frequências máximas ouvidas). A frequência comum de um piano é de 40 a 4000 hertz e a da voz humana se encontra entre 60 e 1300 hertz.
D2) Qual a velocidade do som no ar?
(velocidade do som=340 m/s)
Em Km/h, multiplica 340 por 3,6.
Resultado: 340 m/s = 1224 Km/h
Em Km/h, multiplica 340 por 3,6.
Resultado: 340 m/s = 1224 Km/h
D3) Qual o comprimento da onda da voz humana?
O comprimento de onda é a distância entre dois picos de pressão na
direção de propagação da onda. Os limites inferior e superior de percepção de
ondas sonoras por seres humanos são, respectivamente, 20 Hz e 20.000 Hz (ou
20 kHz). Ondas sonoras de frequências abaixo de 20 Hz são denominadas infrassons,
enquanto que ondas sonoras de freqüência acima de 20 kHz são denominadas
ultrassons. O Som é uma onda mecânica que possui a intensidade e frequência
necessárias para ser percebida pelo ser humano. Para se propagar é necessário
meios materiais como o ar ou o solo.
Por que o seu telefone de latinha é o melhor? - Relatório telefone de latinha
E) Por que o seu telefone de latinha é o melhor?
O nosso telefone de latinha é o melhor por que foi construído após serem realizadas diversas pesquisas na internet, e consulta com pessoas que já haviam feito o projeto, sobre sua construção e desenho, além das aplicações dos conceitos aprendidos em sala e muitos testes realizados com modelos diferentes.
O nosso telefone de latinha é o melhor por que foi construído após serem realizadas diversas pesquisas na internet, e consulta com pessoas que já haviam feito o projeto, sobre sua construção e desenho, além das aplicações dos conceitos aprendidos em sala e muitos testes realizados com modelos diferentes.
Problemas e soluções encontrados durante o trabalho. - Relatório telefone de latinha
F) Problemas e soluções encontrados durante o trabalho.
PROBLEMAS
|
SOLUÇÕES
|
Dificuldade de
entendimento relacionado a palavras grandes ou frases.
|
Maior cuidado
na hora de falar, repetindo mais vezes a palavra ou a frase.
|
Dificuldade de
entendimento quando usava-se dois copos plásticos de tamanhos iguais.
|
Trocou-se os
copos plásticos por dois copos diferentes.
|
Uso de lã fez
com que o som do telefone ficasse mais baixo que o normal
|
No lugar de lã
usou-se barbante.
|
Conclusão. - Relatório telefone de latinha
G) Conclua o trabalho:
segunda-feira, 16 de junho de 2014
Projeto andar de novo?

Mais de 156 pesquisadores de vários países integraram um consórcio responsável pela investigação científica, encabeçado pelo brasileiro Miguel Nicolelis, professor da Universidade Duke, nos Estados Unidos, e do Instituto Internacional de Neurociências de Natal – Edmond e Lily Safra (IINN-ELS).
O princípio envolvido no funcionamento do exoesqueleto é a
chamada "interface cérebro-máquina", que vem sendo explorada por
Nicolelis desde 1999. Esse tipo de conexão prevê que a "força do
pensamento" seja capaz de controlar de maneira direta um equipamento
externo ao corpo humano.
No caso do exoesqueleto do projeto "Andar de
novo", uma touca especial vai captar as atividades elétricas do cérebro
por eletroencefalografia. Quando o voluntário se imaginar caminhando por conta
própria, os sinais produzidos por seu cérebro serão coletados pela touca e
enviados a um computador que fica nas costas da veste robótica.
O computador decodifica essa mensagem e envia a ordem aos
membros artificiais, que passarão a executar os movimentos imaginados pelo
paraplégico. Ao mesmo tempo, sensores dispostos nos pés do voluntário enviam
sinais para a roupa especial. A pessoa, então, sente uma vibração nos braços
toda vez que o robô tocar o chão. É como se o tato dos pés fosse transferido para
os braços, naquilo que Nicolelis chama de "pele artificial".
Porém, no dia 12/06/2014, quando o projeto foi colocado em prática, como tudo em nosso país, a devida atenção não foi dada ao projeto fazendo com que o neurocientista Miguel Nicolelis reclamasse do pouco tempo
reservado ao "chute simbólico" com o exoesqueleto na transmissão da
abertura da Copa do Mundo.
Na transmissão oficial, exibida por emissoras em todo o
mundo, a cena durou sete segundos. Integrantes do projeto "Andar de
Novo" apareceram com o voluntário paraplégico, que estava em pé e já
vestia o exoesqueleto. Ele deu um passo com a perna direita e movimentou a
bola, recolhida por um menino caracterizado de árbitro de futebol. “A Fifa nos informou que nós teríamos 29 segundos para
realizar um experimento dificílimo. Nunca ninguém fez uma demonstração em 29
segundos de robótica. Isso não existe em lugar nenhum do mundo. Foi um esforço
dramático de todas essas pessoas que estão aqui. E nós realizamos em 16”, disse
Nicolelis. “Pelo visto, a Fifa não estava preparada para filmar um experimento
que vai ser histórico”, completou.
Para finalizar gostariamos apenas de ressaltar que além de ser uma injustiça tremenda com tantos estudos envolvendo a física, é um absurdo com a humanidade, uma vez que este projeto poderia beneficiar pessoas do mundo todo (caso houvesse incentivo).
sexta-feira, 30 de maio de 2014
Cientistas do MIT e da Nasa levam conexão Wi-Fi para a Lua
Os pesquisadores usaram tecnologia que fornece conexão via raios laser.
A velocidade da internet da Terra à Lua chegou a 19,4 Mbps.
 |
| Foto da Lua. (Foto: Thiago Souza) |
Pesquisadores do Instituto de Tecnologia de Massachussets (MIT, na sigla em inglês) e da Agência Espacial Americana (Nasa) demonstraram pela primeira vez ser possível levar à Lua conexão à internet sem fio (Wi-Fi), com banda larga o suficiente para fazer a transferência de um vídeo em alta definição.
Os cientistas conseguiram vencer os 384,6 mil quilômetros que separam a Terra da Lua para transmitir dados. Enviararam arquivos da Terra para a Lua a uma velocidade de 19,44 Megabits por segundo (Mbps) e da Lua para Terra a uma taxa de transferência de 622 Mbps. Para isso, usaram uma tecnologia que fornece conexão à internet por meio de raios laser.
“Comunicações a altas taxas da Terra à Lua usando raios laser são desafiantes porque a distância de 400 mil quilômetros dissipa os raios de luz”, afirmou em nota Mark Stevens, um dos pesquisadores do Laboratório Lincoln do MIT, que conduziu a pesquisa.
“É duplamente difícil ir além da atmosfera, porque a turbulência pode dobrar a luz, causando um rápido desvanecimento ou quedas do sinal para o receptor”, diz. Para fugir das interferências, os pesquisadores usaram quatro telescópios localizados no Novo México.
Esses transmissores enviaram sinal para um receptor na órbita da Lua. Esse aparelho, por sua vez, possuía um telescópio embutido que coletava o sinal para retransmiti-lo para fibras óticas similares às usadas na Terra. A partir daí a conexão era amplificada 30 mil vezes. Outro aparelho convertia os pulsos de luz em estímulos elétricos, que eram transformados novamente em bits. São esses pacotes que contém as mensagens enviadas por meio da internet.
A equipe do MIT e da NASA irá apresentar novos detalhes da experiência em 9 de junho durante a Conferência de Lasers e Eletro-Óptica (Cleo, na sigla em inglês), que ocorre na Califórnia.
quarta-feira, 21 de maio de 2014
2º Trimestre: Mudança de Competição
 Houve uma troca entre as competições planejadas para o segundo trimestre, que seria o Robô Gladiador, e o terceiro trimestre, que seria Telefone de Latinha. Portanto, o Telefone de Latinha será realizado neste trimestre e o Robô Gladiador no terceiro.
Houve uma troca entre as competições planejadas para o segundo trimestre, que seria o Robô Gladiador, e o terceiro trimestre, que seria Telefone de Latinha. Portanto, o Telefone de Latinha será realizado neste trimestre e o Robô Gladiador no terceiro.sábado, 26 de abril de 2014
Robótica
Origem
Máquinas que podem operar de
forma autônoma existem desde os tempos clássicos. Já na Grécia antiga, havia
aparelhos que agiam “sozinhos”, através de pesos e bombas pneumáticas. Porém, a
funcionalidade das máquinas não cresceu essencialmente até o século XX.
A ideia de robô vem de uma época
em que se ouviam lendas e mitos, como a Lenda de Cadmus, onde os dentes de um
dragão se transformam em soldados, o Mito do Pigmalião,em que uma estátua ganha
vida, e, ainda, na mitologia clássica, o deus Vulcano,que era deformado da
metalurgia, cria serventes mecânicos. A partir dessas ideias, Karel Capek,
escritor, introduziu a palavra “Robô” em uma peça sua de 1921. A palavra robô,
em si, vem de”robota”, uma palavra checa que significa “trabalho forçado”.
A máquina mais antiga que se
conhece foi um pássaro de madeira propulsionado por vapor e jatos de ar
comprimido, criada por Arquitas de Tarento, matemático grego, em 350 a.C..
O projeto de humanóide mais antigo
foi feito por Leonardo DaVinci em 1495. Foram descobertos nos anos 50 desenhos
detalhados de um cavaleiro mecânico que era capaz de mexer braços, cabeças e
maxilar. Porém, não se sabe se ele tentou construí-lo.
Os primeiros autômatos que
funcionaram foram criados por Jacques de Vaucanson em 1738: um andróide que
tocava flauta e um pato mecânico capaz de comer e defecar.
Mas, segundo as definições
modernas, o primeiro robô foi inventado por Nikola Tesla. Tesla queria
desenvolver o “torpedo sem fio” a fim de se tornar um sistema de armas para a
marinha estadunidense, criado o robô, o qual foi exibido no Madison Square
Garden em 1898.
O que define ser um robô
Segundo o dicionário Priberam,
robô “é um aparelho capaz de agir de maneira automática numa dada função.”
Os robôs, portanto, são
dispositivos eletro ou biomecânicos capazes de realizar funções autônomas, podendo
possuir ou não processamentos, como mecânico, eletrônico com válvulas, eletrônico
com transistores ou eletrônico com circuitos integrados.
Fontes:
Tec Mundo | Robôs | http://www.tecmundo.com.br/3002-robos.htm
[consultado em 17/04/2014 as 14:51]
Robô Livre | Classificação dos robôs | http://robolivre.org/conteudo/classificacao-dos-robos
[consultado em 17/04/2014 as 14:55]
Brasil Escola | Robôs | Nós e os Robôs | http://www.brasilescola.com/informatica/robos.htm
[consultado em 17/04/2014 as 14:59]
Dicionário Priberam da Língua Portuguesa [em linha],
2008-2013 | http://www.priberam.pt/dlpo/rob%C3%B4 [consultado em 17/04/2014 as 15:04]
Com Ciência | De onde vêm os robôs? | http://www.comciencia.br/reportagens/2005/10/02.shtml
[consultado em 17/04/2014 as 15:12]
Portal Robótica | Robótica Educacional | http://www.portalrobotica.com.br/site/index.php?option=com_content&view=article&id=4&Itemid=2
[consultado em 17/04/2014 as 15:26]
O que é Robótica? | http://www.din.uem.br/ia/robotica/oqerobo.htm
[consultado em 17/04/2014 as 15:42]
Portal da Robótica | Fundamentos de Robótica | http://robotica.jamaj.com.br/index/robotica/fundamentos-de
[consultado em 17/04/2014 as 18:02]
Robótica Industrial | Universidade do Porto (FEUP) |
Faculdade de Engenharia | consultadas as páginas 15 e 16 http://paginas.fe.up.pt/~aml/maic_files/introd.pdf
11:04 [consultado em 26/04/2014 as 10:06]
Luso Robótica | http://lusorobotica.com/
[consultado em 26/04/2014 as
10:37]
Robota.br - http://robota.br.tripod.com/index_arquivos/page0001.htm 11:01 [consultado
em 26/04/2014 as 11:01]
Robótica |J. A. M. Felippe de Souza| Introdução aos robôs
| consultadas as páginas 9, 10, 11, 12 e 13 http://webx.ubi.pt/~felippe/texts5/robotica_cap1.pdf
[consultado em 26/04/2014 as 11:30]
Humanoid Robotics | INL – Idaho National Laboratory | https://inlportal.inl.gov/portal/server.pt?open=512&objID=536&parentname=CommunityPage&parentid=7&mode=2&in_hi_userid=3338&cached=true
[consultado em 26/04/2014 as
11:41]
quinta-feira, 17 de abril de 2014
Nasa: descoberto primeiro exoplaneta habitável do tamanho da Terra

Cientistas descobriram o primeiro planeta fora do Sistema Solar de tamanho semelhante ao da Terra e onde pode existir água em estado líquido, o que o torna habitável.
A descoberta reforça a possibilidade de encontrar planetas similares à Terra na nossa galáxia, a Via Láctea, segundo uma equipe internacional de astrônomos liderada por um profissional da Nasa. O trabalho foi publicado na edição desta quinta-feira da revista científica americana Science.
Fontes:
domingo, 30 de março de 2014
Prova oficial
Nesta semana, com inicio no dia 31/03 iniciaremos nossas provas oficiais. A prova de Física será no dia 8 de Abril e a matéria a ser estudada será toda a trabalhada neste 1° Trimestre.
Eletroímã de Prego
Eletroímã é um dispositivo feito para criar um campo de atração magnética similar a dos imãs naturais, o eletroímã de prego pode ser formado por um prego enrolado por um fio. Quando o fio é percorrido por uma corrente elétrica faz com que o prego comporte-se como um ímã permanente atraindo os clipes.
Para construir o eletroímã nosso grupo utilizou:
- 1 prego de 11cm.
- 1 fio de cobre encapado de aproximadamente 0,5m.
- 1 pilha D de 1,5V.
- Alicate.
- Fita isolante.
- Clipes (para serem atraídos pelo eletroímã).

(Foto do eletroímã do grupo 5-3°A)
Agora, por que isto acontece?
Porque a pilha fornece energia para que haja corrente elétrica passando pelo fio. Isto faz com que o prego e o fio enrolado se comportem como um imã, por isso acaba atraindo os clipes; ou seja, criamos um eletroímã, porque o magnetismo dele é produzido pela corrente elétrica.
Na competição de sala do dia 24, nosso grupo ficou em 4° lugar conseguindo o melhor resultado com 117 clipes.
Fontes bibliograficas: http://www.brasilescola.com/fisica/como-fazer-um-eletroima.htm
http://cmais.com.br/x-tudo/experiencia/16/eletroima.htm
Fontes bibliograficas: http://www.brasilescola.com/fisica/como-fazer-um-eletroima.htm
http://cmais.com.br/x-tudo/experiencia/16/eletroima.htm
domingo, 9 de março de 2014
9 anos da morte de César Lattes

 Ontem, 08 de março, completou-se 9 anos da morte de César Lattes, físico brasileiro descobridor do méson pi.
Ontem, 08 de março, completou-se 9 anos da morte de César Lattes, físico brasileiro descobridor do méson pi.(Nas fotos aos lados: César Lattes no ano de sua descoberta).
O primeiro artigo de César Lattes sobre o méson pi
No dia 24 de maio de 1947, a Nature, revista inglesa, publicou o artigo "Processes involving charged mesons", a primeira publicação sobre a descoberta do méson pi. Encontramos o arquivo em PDF para os interessados. Porém, deve-se lembrar que este contém direitos autorais, não sendo permitida a cópia e utilização desta em redes da mídia. Utilize-o apenas para aprender e saber mais. Clique aqui para ler a publicação.
Assinar:
Postagens (Atom)